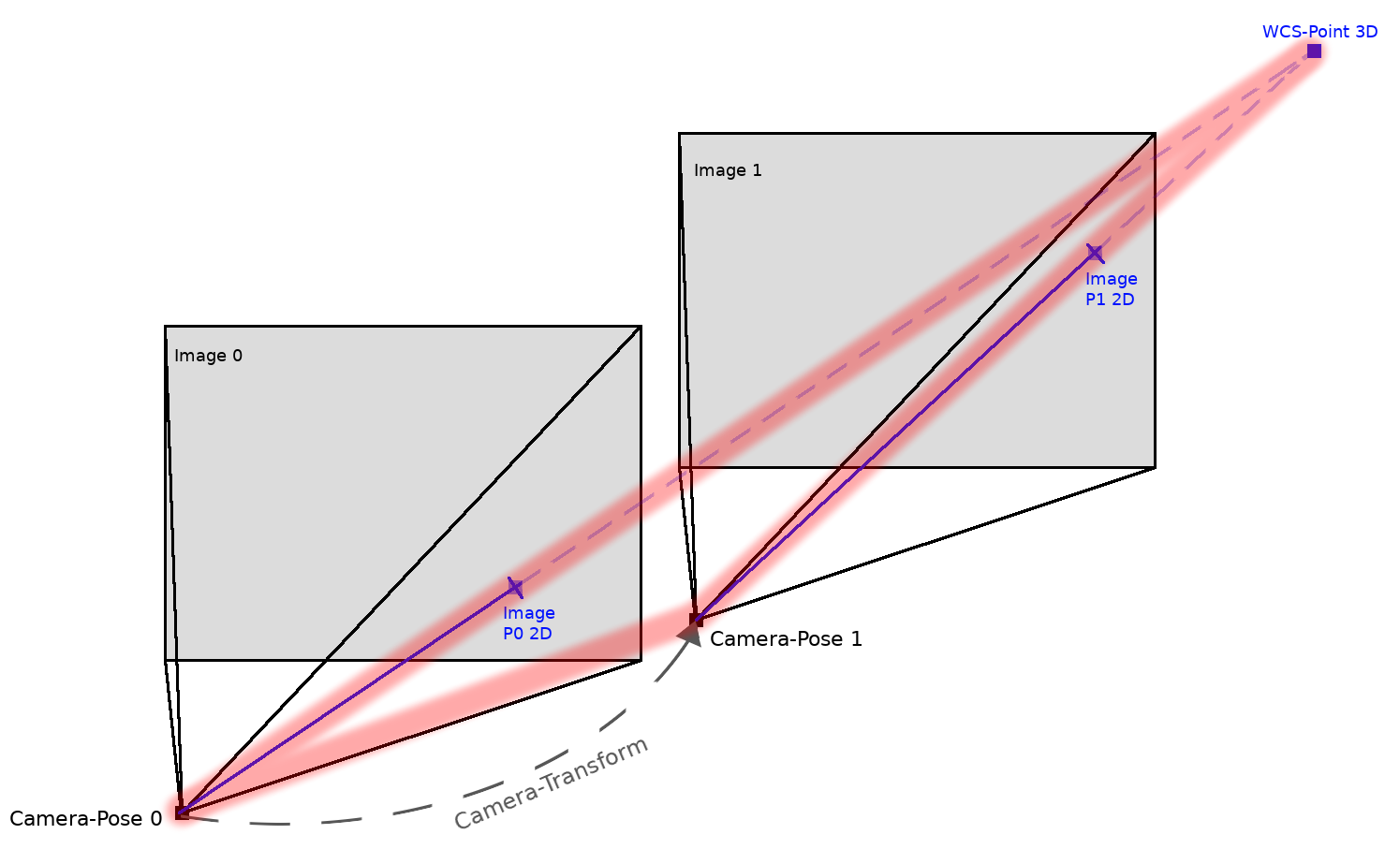
Given two image-points from two different positions of a camera, we want to calculate the 3D coordinate that this point is located at in the world. This is highly related to Structure from Motion (sfm) approaches, where we try to create a dense 3d point-cloud using consecutive images (of course this will only work if the 3D worldpoint in question is not moving itself, or if we know it’s movement):
")


Neueste Kommentare