Groundtruth data for Computer Vision with Blender
- by TobiasWeis
- in Blender Computer Vision Machine Learning Short Simulation
- posted January 14, 2016
In the video below you can see the sequence of a car driving in a city scene and braking. The layers I rendered out for groundtruth data are the rendered image with the boundingbox of the car (top left), the emission layer ( shows the brakelights when they start to emit light, top right ), the optical flow (lower left), and the depth of each pixel in the world scene ( lower right).
Render-time was about 10h on a Nvidia GeForce GTX 680, tilesize 256×256, total image-size: 960×720. In this article I will first demonstrate how to set up the depth rendering, and afterwards how to extract, save and recover the optical flow.
Setting up groundtruth rendering for depth, saving and reading it again
After you have composed your scene, switch to the Cycles rendering engine, and enable the render-passes in the properties-view (under render-layers) you plan on saving as ground-truth information. In this case, I selected the Z-layer, which represents the depth of the scene:

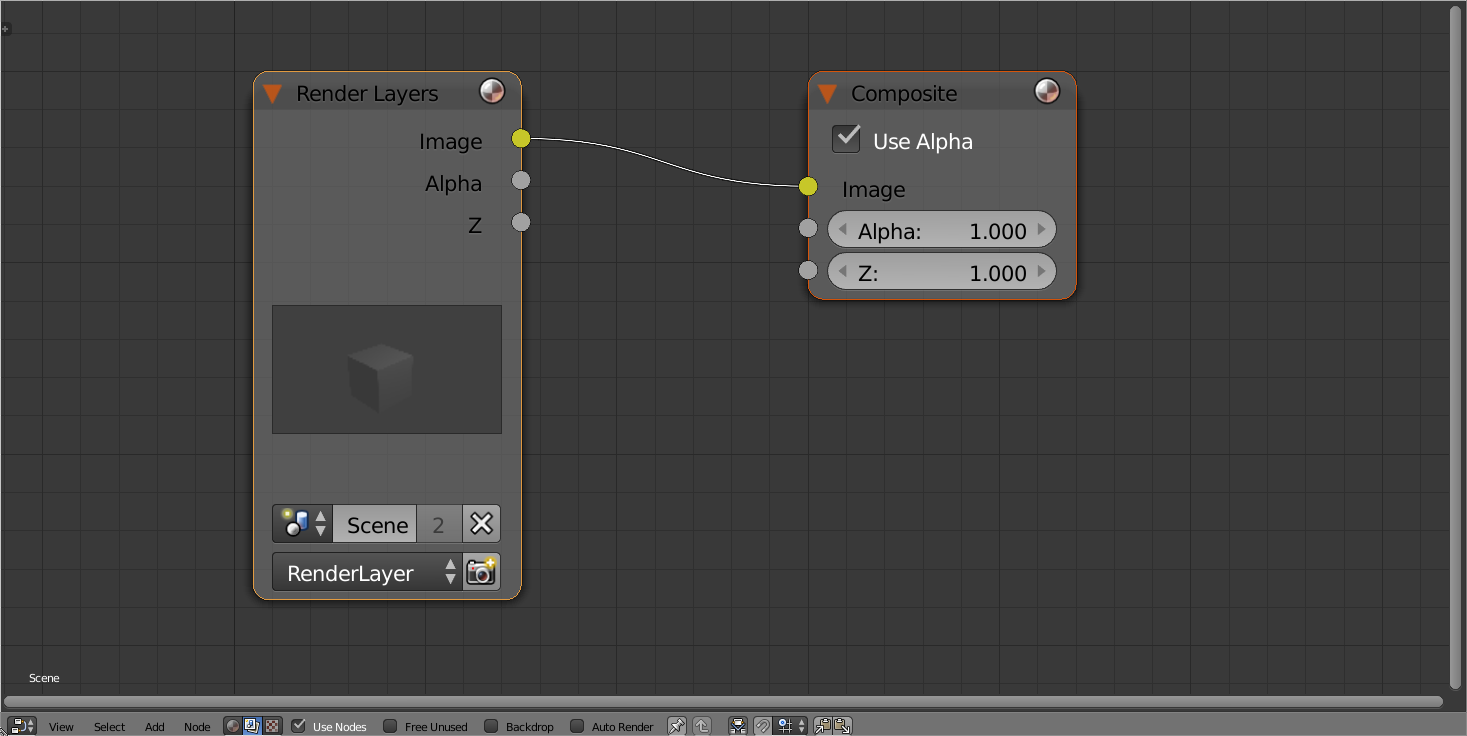
Now open the Node-editor-view, display the Compositing-Nodetree and put a checkmark at “Use Nodes”, it should look like this:
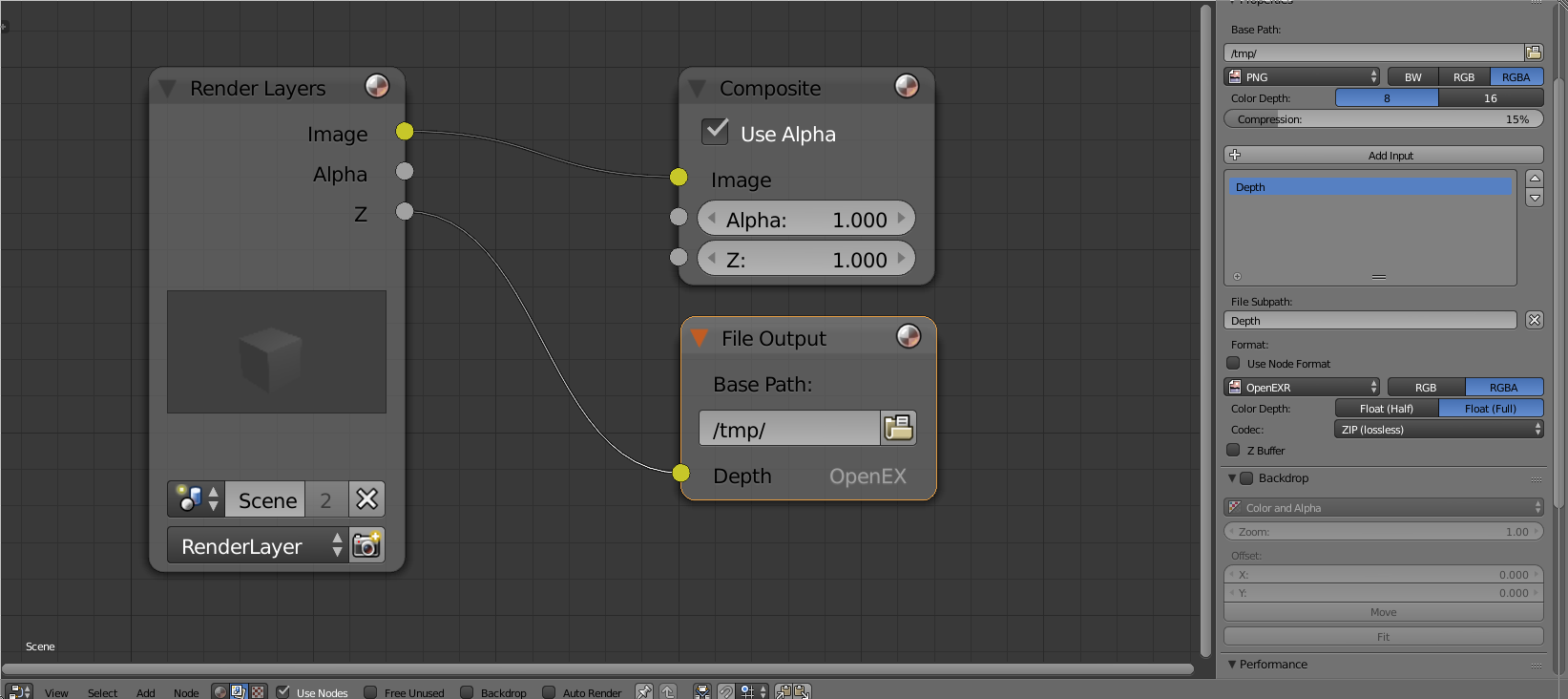
Hit “T”, and in the “output”-tab, select “File Output”. Connect it to the Z-output of the render-layers-node. Hit “N” while the File-Output-node is selected, enter an appropriate File-subpath as name for the data (I chose “Depth” here), and depending on your usecase, change the output format. As I am expecting float-values that are not constrained to 0-255, I will save the data in the OpenEXR-format:
After rendering ([F12]), we have a file called /tmp/Depth0001.exr. It can be read and displayed using python:
#!/usr/bin/python
'''
author: Tobias Weis
'''
import OpenEXR
import Imath
import array
import numpy as np
import csv
import time
import datetime
import h5py
import matplotlib.pyplot as plt
def exr2numpy(exr, maxvalue=1.,normalize=True):
""" converts 1-channel exr-data to 2D numpy arrays """
file = OpenEXR.InputFile(exr)
# Compute the size
dw = file.header()['dataWindow']
sz = (dw.max.x - dw.min.x + 1, dw.max.y - dw.min.y + 1)
# Read the three color channels as 32-bit floats
FLOAT = Imath.PixelType(Imath.PixelType.FLOAT)
(R) = [array.array('f', file.channel(Chan, FLOAT)).tolist() for Chan in ("R") ]
# create numpy 2D-array
img = np.zeros((sz[1],sz[0],3), np.float64)
# normalize
data = np.array(R)
data[data > maxvalue] = maxvalue
if normalize:
data /= np.max(data)
img = np.array(data).reshape(img.shape[0],-1)
return img
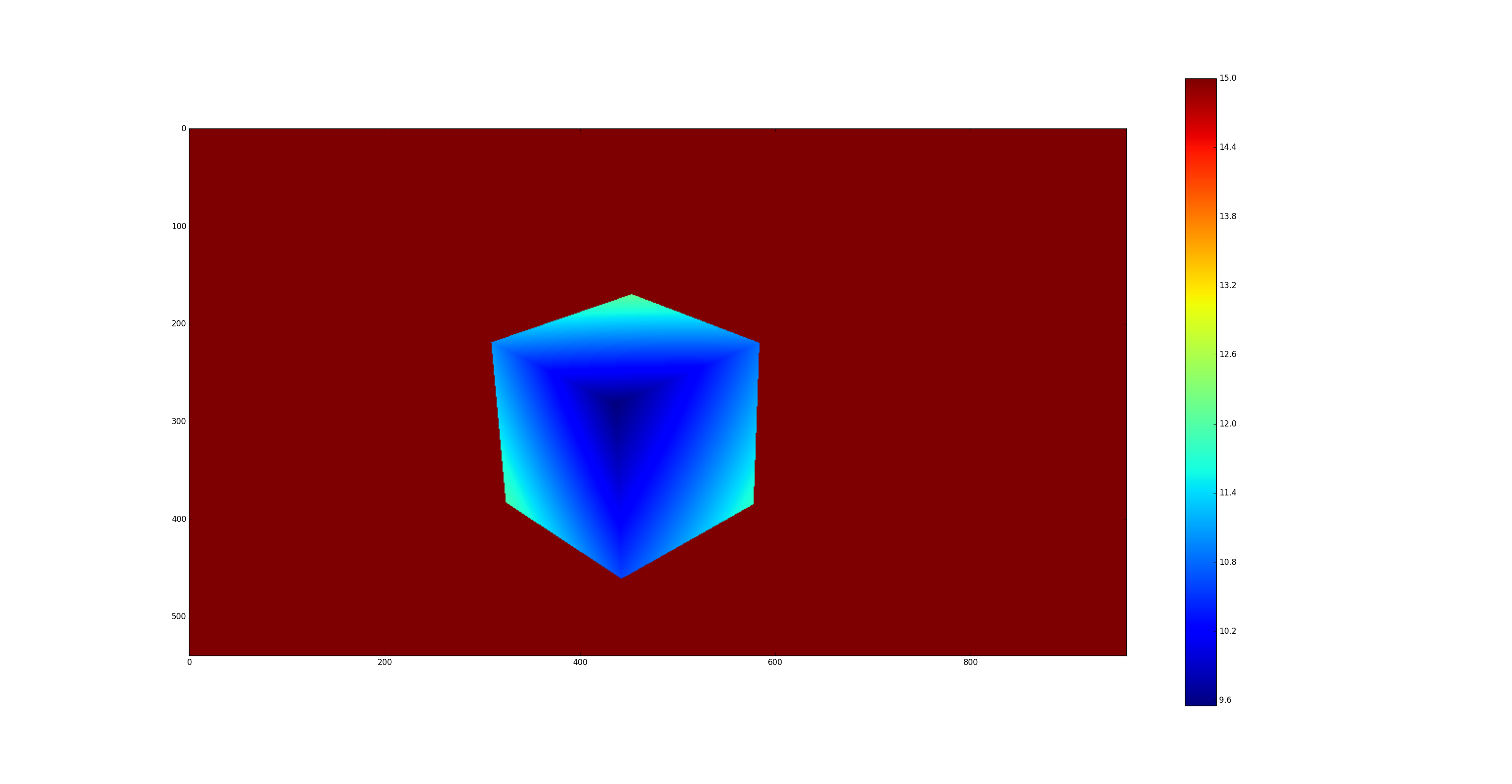
depth_data = exr2numpy("Depth0001.exr", maxvalue=15, normalize=False)
fig = plt.figure()
plt.imshow(depth_data)
plt.colorbar()
plt.show()
The output of this script on the default-scene looks like this:
Setting up groundtruth rendering for optical flow (speed vector), saving and reading it again
Create a scene with an object and a camera in it, then set keyframes for the camera (right-click on the location-values and select “Insert keyframe”). In the example below, I moved the camera 2m in its forward-direction over three frames. As you can see, the render-layer “Vector” is enabled and like in the example above, I connected it to a File Output node and saved it in OpenEXR format.
If you now set your End-Frame (bottom panel), you can hit animate, and cycles will happily render the images and vector-maps to /tmp/. The following code-snippet will calculate any interesting informations about the optical flow for you.
Important information: The flow-values are saved in the R/G-channel of the output-image, where the R-channel contains the movement of each pixel in x-direction, the G-channel the y-direction. The offsets are encoded from the current to the previous frame, so the flow-information from the very first frame will not yield usable values. Also, in blender the y-axis points upwards. (The B/A-channels contain the offsets from the next to the current frame).
import array
import OpenEXR
import Imath
import numpy as np
import cv2
def exr2flow(exr, w,h):
file = OpenEXR.InputFile(exr)
# Compute the size
dw = file.header()['dataWindow']
sz = (dw.max.x - dw.min.x + 1, dw.max.y - dw.min.y + 1)
FLOAT = Imath.PixelType(Imath.PixelType.FLOAT)
(R,G,B) = [array.array('f', file.channel(Chan, FLOAT)).tolist() for Chan in ("R", "G", "B") ]
img = np.zeros((h,w,3), np.float64)
img[:,:,0] = np.array(R).reshape(img.shape[0],-1)
img[:,:,1] = -np.array(G).reshape(img.shape[0],-1)
hsv = np.zeros((h,w,3), np.uint8)
hsv[...,1] = 255
mag, ang = cv2.cartToPolar(img[...,0], img[...,1])
hsv[...,0] = ang*180/np.pi/2
hsv[...,2] = cv2.normalize(mag,None,0,255,cv2.NORM_MINMAX)
bgr = cv2.cvtColor(hsv,cv2.COLOR_HSV2BGR)
return img, bgr, mag,ang
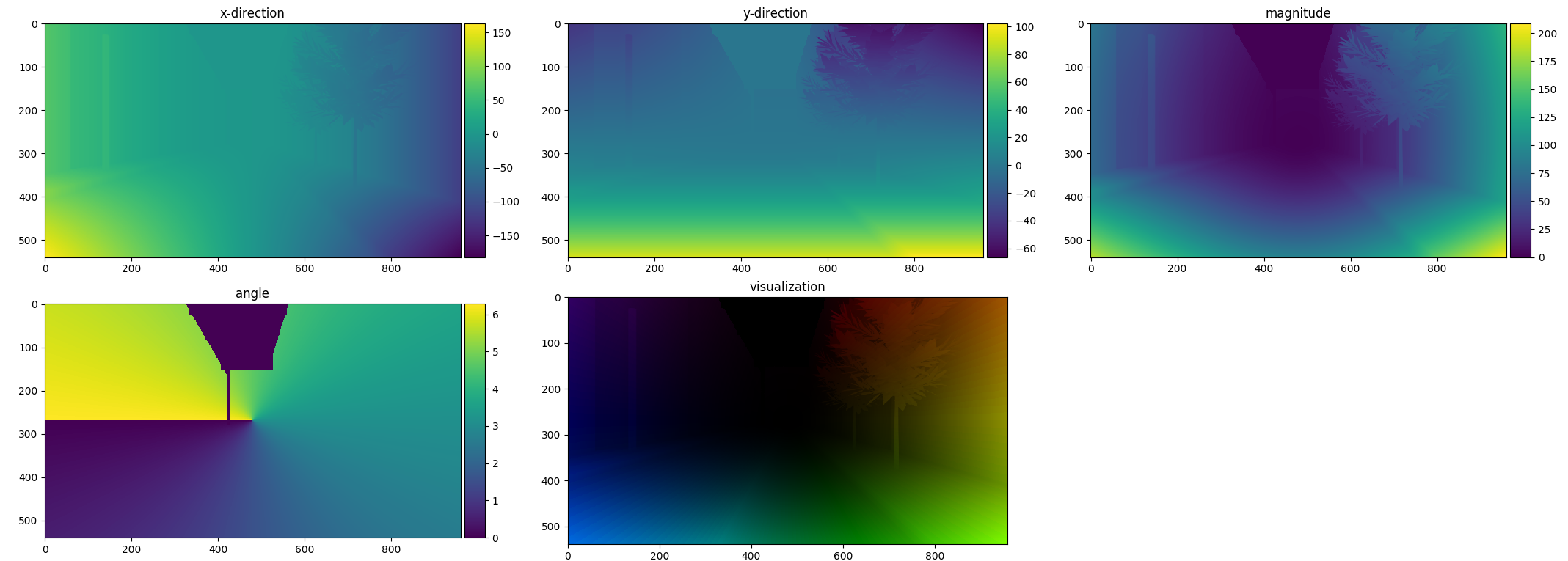
We can now use (and plot these informations), img contains the x/y-offsets in pixels, and by using opencvs cartToPolar-function we can calculate magnitude (absolute offset) and according angles for each pixels.
Finally, we can convert everything to a nice-looking color-image by first using the HSV (hue, saturation, value) colorspace, setting the hue to the angle, saturation to full, and the value to the magnitude:
Further layers to generate groundtruth data
Besides depth information, we can also generate groundtruth data for other modalities:
- Object/Material index: Can be used to generate pixel-accurate annotations of objects for semantic segmentation tasks, or simply computing bounding boxes for IOU measures
- Normal: Can be used to generate pixel-accurate groundtruth data of surface normals
- Vector: Will show up as “Speed” in the node editor, contains information for optical flow between two frames in a sequence
- Emit: Pixel-accurate information of emssion-properties.
Comments
Rohit
June 8, 2018 at 9:10 amI am trying to generate PNG images. But it is generating white images(all pixels 255). I tried exr format but that includes overhead and is last option as the business requirement. Could you please help me out figuring this problem that why PNG is not an appropriate render?
TobiasWeis
June 8, 2018 at 10:15 amHi Rohit, depth, flow, etc. Are float values and need to be saved as such. “Regular” image encoding usually stores pixel values in uint8 format. I found that using OpenEXR is the best way to go, as it is also supported by a bunch of other programming languages.
Rohit
July 5, 2018 at 1:26 pmThanks.
Ergys
October 16, 2018 at 8:54 pmThanks for the tutorial Tobias! I have two questions:
1. How can one generate the occlusion mask in the next frame (for optical flow)?
2. Any suggestion how to obtain the optical flow between frame t and frame t+k, k>1?
Matteo Taiana
March 28, 2019 at 4:43 pmThanks Tobias, very useful!
Vivasvan
June 3, 2019 at 4:36 pmThank you so much, brother. You are awesome!
Arun
April 22, 2024 at 10:04 pmThanks for the well articulated tutorial Tobias. I am also trying to get the linear and angular velocity of the camera. Do you have any idea on how the velocity data can be extracted?